
Walk These Ways: Tuning Robot Control for Generalization with Multiplicity of Behavior
Authors
Gabriel B Margolis, Pulkit Agrawal
Abstract
Learned locomotion policies can rapidly adapt to diverse environments similar to those experienced during training but lack a mechanism for fast tuning when they fail in an out-of-distribution test environment. This necessitates a slow and iterative cycle of reward and environment redesign to achieve good performance on a new task. As an alternative, we propose learning a single policy that encodes a structured family of locomotion strategies that solve training tasks in different ways, resulting in Multiplicity of Behavior (MoB). Different strategies generalize differently and can be chosen in real-time for new tasks or environments, bypassing the need for time-consuming retraining. We release a fast, robust open-source MoB locomotion controller, Walk These Ways, that can execute diverse gaits with variable footswing, posture, and speed, unlocking diverse downstream tasks: crouching, hopping, high-speed running, stair traversal, bracing against shoves, rhythmic dance, and more. Video and code release: https://gmargo11.github.io/walk-these-ways/
Concepts
The Big Picture
Imagine teaching someone to walk by only ever practicing on a gym floor. The moment they step outside onto gravel, ice, or a flight of stairs, they freeze. Nothing in their training prepared them for that. That’s the central problem of modern robot locomotion. Researchers spend months training a four-legged robot to walk, only to find that the slightest deviation from the training environment sends it stumbling. A slippery patch, an unexpected step, a shove from behind: any of these can wreck a carefully learned gait.
The conventional fix is painstaking. Redesign the scoring rules that tell the robot what counts as good behavior. Tweak the simulation. Retrain from scratch. Test in the real world. Repeat. Adjustments that help the robot climb stairs often hurt its performance on slippery ground. There’s no free lunch.
Gabriel Margolis and Pulkit Agrawal at MIT’s Improbable AI Lab took a different approach. Rather than searching for one perfect walking strategy, they asked: what if a single trained policy (the robot’s learned decision-making program) contained many strategies, all equally valid during training, but each performing differently on unfamiliar terrain? The result is Multiplicity of Behavior (MoB) and an open-source controller called Walk These Ways.
Key Insight: A robot policy doesn’t have to commit to one way of walking. By encoding a structured family of behaviors into a single policy, you can tune robot locomotion in real time for new environments, no retraining required.
How It Works
MoB starts from an observation about under-specification: many different locomotion strategies can equally solve a training task. Walking on flat ground constrains only one thing, the robot’s overall forward velocity. It says nothing about how high the feet should lift, how wide the stance should be, how the torso should angle, or how fast the legs should cycle.
Two robots walking at the same speed with completely different gaits both “succeed” during training. But on ice, one slips while the other holds firm. On stairs, one stumbles while the other clears each step cleanly.
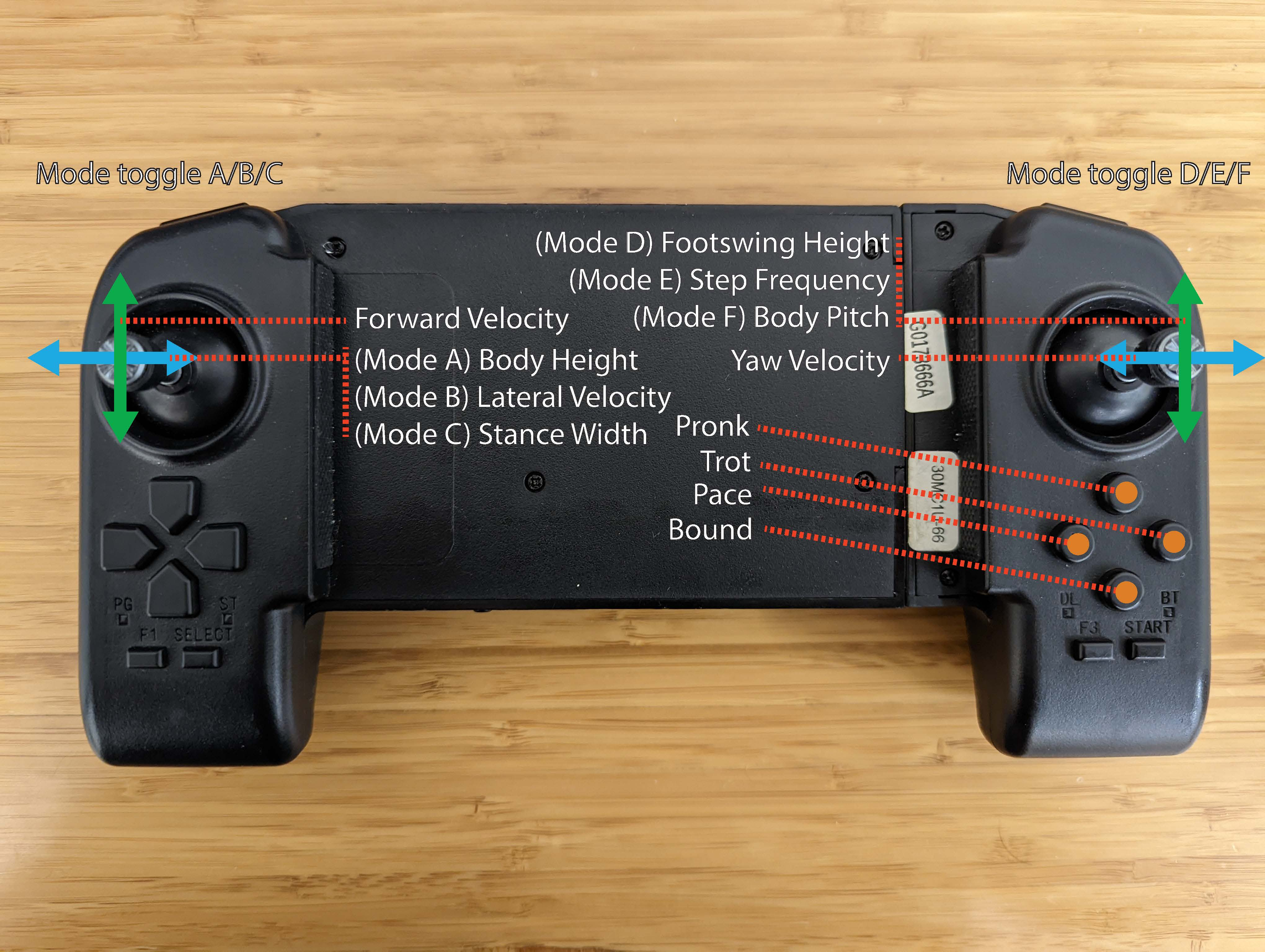
MoB exploits this on purpose. Instead of training a policy that locks onto one solution, the researchers train a policy that takes as additional inputs a small set of behavior parameters: variables specifying aspects of the gait like foot clearance height, body posture, gait frequency, and foot contact timing. At training time, these parameters are randomized across a wide range of combinations, forcing the policy to learn not one walk but a whole family of walks. At deployment time, a human operator or higher-level controller can dial these parameters in real time. No retraining, no reward engineering.
The technical implementation pairs reinforcement learning (a training method where the robot improves by trial and error, guided by rewards for good behavior) with a timing-based gait parameterization. That parameterization encodes when each foot should be on the ground and when it should swing. The policy receives behavior parameters alongside standard sensory observations like joint angles, velocities, and orientation estimates, then learns to produce the joint forces that realize the requested movement.
With the right timing parameters, the controller executes classical structured gaits: trotting, bounding, pacing, and pronking (a springy leap where all four feet leave the ground simultaneously).
The training setup is minimal. Flat ground only. No stairs, no rough terrain, no external disturbances. Yet by encoding a rich behavioral repertoire, the same policy handles all of the following when parameters are tuned by hand:
- Stair traversal with a low-frequency gait and high foot clearance
- Slippery terrain sprinting using a high-frequency, low-clearance gait
- Resistance to external shoves through a wide stance and low swing height
- Crouching under obstacles via a low-body-height posture mode
- High-speed running, hopping, and rhythmic dance through direct gait parameter control
The parameters are interpretable. A human can look at a new environment, reason about what kind of gait it demands, and adjust accordingly. That’s far faster than redesigning a reward function and waiting hours for retraining.
Why It Matters
Every robot trained in simulation faces a world slightly different from what it practiced on. This is the sim-to-real gap, and more accurate simulation alone will never fully close it. MoB takes a different angle: instead of simulating every possible scenario, simulate diversity of behavior, and let humans or higher-level algorithms pick the right behavior at deployment time.
The idea goes beyond locomotion. Any reinforcement learning setting where the training task under-specifies the solution (which is most real-world tasks) could benefit from the same trick. Behavioral diversity hedges against an unpredictable world without requiring you to predict what that world looks like in advance.
The Walk These Ways controller is also a useful foundation for larger systems. Its interpretable control interface makes it easy to slot in as the low-level layer beneath higher-level task planners, demonstration collection systems, or learned behavior selectors.
Bottom Line: Walk These Ways proves that a single robot policy, trained only on flat ground, can handle stairs, ice, shoves, and dance moves. The trick isn’t better simulation. It’s encoding a structured family of behaviors tunable in real time. Behavioral diversity turns out to be a powerful tool for generalization.
IAIFI Research Highlights
This work connects reinforcement learning theory with hands-on robotics engineering. Under-specification in policy learning has been understood theoretically for a while, but here it gets put to immediate, practical use deploying robots in the real world.
MoB gives researchers a way to encode behavioral diversity into a single learned policy. It offers a different angle on out-of-distribution generalization, one that complements domain randomization and meta-learning rather than replacing them.
The approach reduces dependence on accurate physics simulation, which matters for any physical system operating where the true dynamics are unknown or hard to model.
A natural next step is automated parameter selection, where a learned system chooses behaviors on the fly instead of a human operator. The same idea could extend to manipulator arms or other physical systems. The paper is available at [arXiv:2212.03238](https://arxiv.org/abs/2212.03238) and the open-source controller at https://gmargo11.github.io/walk-these-ways/.
Original Paper Details
Walk These Ways: Tuning Robot Control for Generalization with Multiplicity of Behavior
2212.03238
Gabriel B Margolis, Pulkit Agrawal
Learned locomotion policies can rapidly adapt to diverse environments similar to those experienced during training but lack a mechanism for fast tuning when they fail in an out-of-distribution test environment. This necessitates a slow and iterative cycle of reward and environment redesign to achieve good performance on a new task. As an alternative, we propose learning a single policy that encodes a structured family of locomotion strategies that solve training tasks in different ways, resulting in Multiplicity of Behavior (MoB). Different strategies generalize differently and can be chosen in real-time for new tasks or environments, bypassing the need for time-consuming retraining. We release a fast, robust open-source MoB locomotion controller, Walk These Ways, that can execute diverse gaits with variable footswing, posture, and speed, unlocking diverse downstream tasks: crouching, hopping, high-speed running, stair traversal, bracing against shoves, rhythmic dance, and more. Video and code release: https://gmargo11.github.io/walk-these-ways/