
Multistable Shape from Shading Emerges from Patch Diffusion
Authors
Xinran Nicole Han, Todd Zickler, Ko Nishino
Abstract
Models for inferring monocular shape of surfaces with diffuse reflection -- shape from shading -- ought to produce distributions of outputs, because there are fundamental mathematical ambiguities of both continuous (e.g., bas-relief) and discrete (e.g., convex/concave) types that are also experienced by humans. Yet, the outputs of current models are limited to point estimates or tight distributions around single modes, which prevent them from capturing these effects. We introduce a model that reconstructs a multimodal distribution of shapes from a single shading image, which aligns with the human experience of multistable perception. We train a small denoising diffusion process to generate surface normal fields from $16\times 16$ patches of synthetic images of everyday 3D objects. We deploy this model patch-wise at multiple scales, with guidance from inter-patch shape consistency constraints. Despite its relatively small parameter count and predominantly bottom-up structure, we show that multistable shape explanations emerge from this model for ambiguous test images that humans experience as being multistable. At the same time, the model produces veridical shape estimates for object-like images that include distinctive occluding contours and appear less ambiguous. This may inspire new architectures for stochastic 3D shape perception that are more efficient and better aligned with human experience.
Concepts
The Big Picture
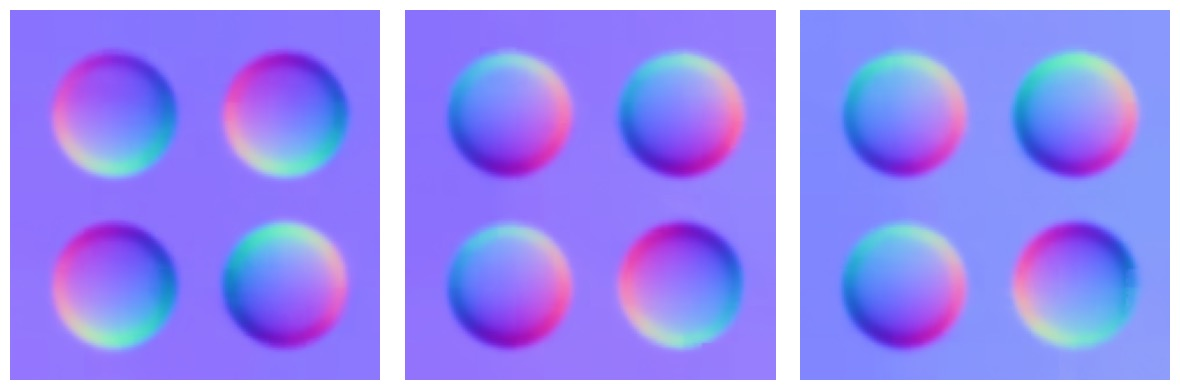
Stare at an image of a dimpled golf ball long enough and something strange happens: the dimples suddenly pop outward, becoming bumps. Flip the photo upside down and they sink back in. Your brain hasn’t changed, and neither has the image, but your perception of the three-dimensional shape has flipped entirely.
This isn’t a quirk. It’s a mathematical truth about matte surfaces: when photographed from a single viewpoint, multiple three-dimensional shapes can produce the exact same pattern of light and shadow. The image is genuinely ambiguous.
Humans experience this directly, alternating between competing shape interpretations in what vision scientists call multistable perception. Yet virtually every existing model for recovering 3D shape from a photograph ignores this, committing to a single “best guess” and pretending the ambiguity doesn’t exist.
Researchers at Harvard and Kyoto University have now built a model that does what humans do: rather than committing to one answer, it holds multiple valid shape interpretations open simultaneously, all in a package that fits in 10 megabytes.
Key Insight: By training a tiny diffusion model on local 16×16 image patches and deploying it at multiple scales with consistency constraints, global perceptual ambiguity (the kind humans experience) emerges from purely local, bottom-up processing.
How It Works
The core idea sounds almost too simple: train a small model on tiny image patches, then let the pieces talk to each other.
The team trained a denoising diffusion process on 16×16 pixel crops from synthetic images of matte objects. The model predicts surface normal fields, which encode the 3D orientation of each surface point as a vector perpendicular to the surface. Training on patches rather than whole images keeps the model compact (just 10MB of weights) and forces it to learn local shading relationships without baking in global scene biases.
At inference time, three things happen:
- Patch-wise generation: The diffusion model runs in parallel across non-overlapping 16×16 patches, sampling possible surface normals for each patch independently.
- Inter-patch consistency guidance: Two constraint losses nudge neighboring patches toward a globally coherent shape. A curvature smoothness loss penalizes abrupt, physically unrealistic changes in surface bending between patches. An integrability loss enforces that surface normals correspond to a valid 3D surface. Without it, adjacent patches could each make local sense but fail to stitch together into a coherent object.
- Multi-scale V-cycle sampling: The model cycles between fine and coarse spatial resolutions during the diffusion process, resampling predictions at intermediate noise levels before resuming denoising. This “fine-coarse-fine” pattern is borrowed from classical image-processing optimization. Ablation experiments confirm it prevents the model from getting trapped in locally coherent but globally contradictory solutions.
Lighting gets a pragmatic treatment. Instead of estimating a precise global light source (ill-posed given real-world complications like interreflections and ambient occlusion), each patch nominates a dominant light direction. When the model detects a global convex/concave ambiguity, all patches flip their interpretations together through a global flip mechanism.
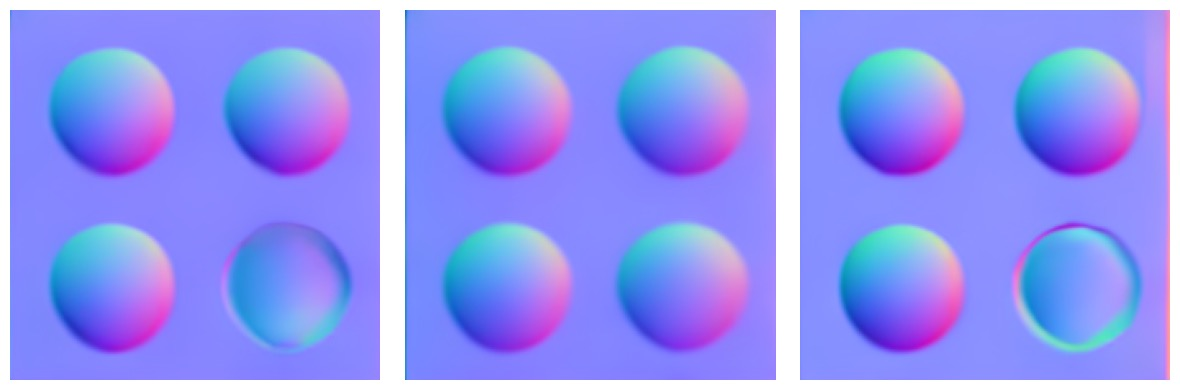
On ambiguous images like the golf ball, the model produces genuinely multimodal output: distinct samples corresponding to concave and convex interpretations. On ordinary objects with clear occluding contours, it converges on a single accurate estimate. No special rule governs when to be certain versus uncertain. That behavior fell out of the architecture on its own.
Why It Matters
Start with the practical side: size. Previous diffusion-based shape models like Marigold and Wonder3D need 2–3 gigabytes of weights and still produce unimodal outputs, single guesses that ignore perceptual ambiguity. This model matches their accuracy on unambiguous images while also capturing multistability, in a package 200–300 times smaller. For robotics, augmented reality, or any application that needs real-time 3D scene understanding from a single camera, that gap is hard to ignore.
The theoretical payoff runs deeper. Global multistability emerges here from purely local patch-level processing, with no high-level understanding of objects or scenes. That’s a strong hint that the human visual system might work on similar principles. David Marr’s “principle of least commitment,” a foundational idea in vision science, argued that perception should avoid premature decisions that might need to be undone. This model puts that principle into practice: a probabilistic architecture that keeps multiple shape interpretations alive, resolving ambiguity only when the evidence demands it.
Open questions remain. The framework currently handles only matte (Lambertian) surfaces. Extending it to shiny or transparent materials, incorporating sparse depth cues for selective disambiguation, and developing richer multi-scale coordination are all obvious next steps.
Bottom Line: A tiny patch-based diffusion model trained only on local image regions spontaneously learns to perceive 3D shape the way humans do, holding multiple conflicting interpretations simultaneously. Efficient, ambiguity-aware 3D perception doesn’t require massive models or global scene understanding.
IAIFI Research Highlights
This work sits at the intersection of computational vision, perceptual psychology, and generative AI. It takes multistable shape perception, a phenomenon studied for decades in human vision, and builds a working mathematical model of it with diffusion architectures.
A 10MB patch-based diffusion model matches or outperforms gigabyte-scale models on shape estimation while also capturing perceptual ambiguity. Efficient, uncertainty-aware 3D perception is now practical.
The mathematical ambiguities of Lambertian shading (including bas-relief transformations and global convex/concave flips) are formalized and encoded as a learned generative distribution, tying physical light-transport laws directly to perceptual phenomena.
Open directions include extending the framework to non-Lambertian surfaces and incorporating sparse depth cues for selective disambiguation. The paper appeared at NeurIPS 2024 ([arXiv:2405.14530](https://arxiv.org/abs/2405.14530) by Han, Zickler, and Nishino).