
Distilled Feature Fields Enable Few-Shot Language-Guided Manipulation
Authors
William Shen, Ge Yang, Alan Yu, Jansen Wong, Leslie Pack Kaelbling, Phillip Isola
Abstract
Self-supervised and language-supervised image models contain rich knowledge of the world that is important for generalization. Many robotic tasks, however, require a detailed understanding of 3D geometry, which is often lacking in 2D image features. This work bridges this 2D-to-3D gap for robotic manipulation by leveraging distilled feature fields to combine accurate 3D geometry with rich semantics from 2D foundation models. We present a few-shot learning method for 6-DOF grasping and placing that harnesses these strong spatial and semantic priors to achieve in-the-wild generalization to unseen objects. Using features distilled from a vision-language model, CLIP, we present a way to designate novel objects for manipulation via free-text natural language, and demonstrate its ability to generalize to unseen expressions and novel categories of objects.
Concepts
The Big Picture
Imagine handing a new employee a warehouse manifest and asking them to find “the red ceramic mug with the chipped handle” among hundreds of cluttered bins. They can do it. They understand language, recognize objects by shape and texture, and know how to grip a fragile cup differently from a metal wrench. Now ask a robot. Nearly every piece of that sentence becomes a hard open problem.
AI models trained on massive image datasets have gotten very good at understanding what things are. But robots live in three dimensions. They don’t just need to recognize a mug; they need to know exactly where to wrap their fingers around it in 3D space. That’s a different kind of knowledge, and the two have been hard to combine.
Image-based AI can’t tell you where an object sits in space or how to reach for it. 3D geometry systems, meanwhile, can’t understand what objects mean or connect them to language. A team from MIT CSAIL and IAIFI built F3RM (Feature Fields for Robotic Manipulation) to close that gap: a system that teaches robots to grasp and place objects guided by a few examples or a plain English description.
Key Insight: F3RM bakes 2D language and visual features into a 3D neural scene representation, giving robots a world model that is both geometrically precise and semantically aware. The result: generalization to novel objects and open-ended language commands from just a handful of demonstrations.
How It Works
The pipeline starts with something almost comically low-tech: the robot takes a series of photos of a tabletop scene using an RGB camera on a selfie stick. From those photos, the system builds up its understanding in three stages.
Step 1: Build a feature field. The team trains a Neural Radiance Field (NeRF), a neural network that reconstructs a 3D scene from ordinary 2D photos by predicting color and density at every point in space. F3RM adds a twist: alongside RGB color, the NeRF also predicts feature vectors from a pre-trained 2D vision model at every 3D location.
The output is a Distilled Feature Field (DFF), a 3D scene map where every point carries descriptive information inherited from large-scale vision models. Think of it as a 3D volume that encodes both geometry and meaning.
Training a NeRF used to take hours, which is impractical for real-time robotics. The researchers use hierarchical hashgrids, which analyze scene structure at multiple spatial scales simultaneously, cutting that time down to minutes.
Step 2: Extract the right features. The system draws on two pre-trained models, each with a different job:
- DINO ViT, a visual model trained without human labels, whose internal features act as fingerprints for matching object parts across different instances of the same category
- CLIP, a vision-language model trained on image-text pairs, whose features align visual concepts with natural language
There’s a subtlety here. CLIP produces image-level features: one descriptor for a whole photo. But baking features into a 3D field requires dense, pixel-level descriptors. The researchers solve this with the MaskCLIP reparameterization trick, which tweaks CLIP’s internal processing to produce location-specific features for each image patch while preserving the link between images and language.
Step 3: Generalize from demos or language. Given a few demonstrations of grasping a particular object category (say, a mug grabbed by its handle), the system matches the 3D feature signature of that demo to the best corresponding location on a new, unseen object. Because DINO features encode structural similarity across instances, a robot that learned to hold one mug can transfer that grip to a mug it has never seen.
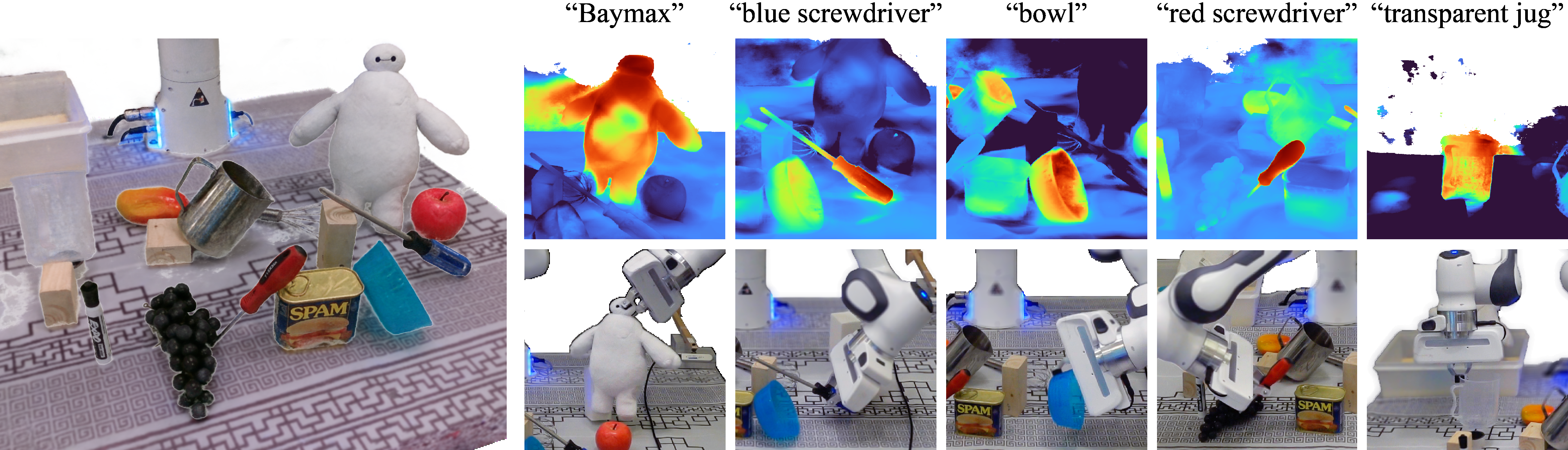
For language-guided manipulation, a user types a query like “the green toy” or “the object you would pour water from,” and the system queries the CLIP feature field to generate a 3D heatmap of relevance. The highest-activation region identifies the target, and the robot infers a full 6-DOF grasp pose from that location: three values for position, three for orientation.
That six-degrees-of-freedom precision is what lets the system handle objects in arbitrary poses, not just upright items on a flat surface.
Why It Matters
The range of generalization is worth paying attention to. The robot handles objects that differ from demonstrations in shape, size, material, and orientation. It responds to language queries never seen during training, including new phrasings and entirely new object categories. Open-ended generalization like this has been a longstanding goal of robotic manipulation research.
The architectural lesson matters too. F3RM shows that the knowledge inside large vision-and-language models, trained on billions of internet images and text-image pairs, can be transplanted into 3D representations without diluting it. Robot world models don’t have to choose between geometric precision and semantic depth. They can have both.
As the underlying foundation models keep improving, systems built on this architecture inherit those gains for free.
Bottom Line: A robot armed with a few demos and a semantic 3D feature field can pick up objects it has never seen before, guided by plain English. That’s a concrete step toward warehouse robots, assistive systems, and any machine that needs to operate in uncontrolled environments.
IAIFI Research Highlights
This work pulls together computer vision (NeRF, CLIP, DINO), natural language processing, and robotic manipulation into a single pipeline, cutting across the disciplinary boundaries IAIFI was created to bridge.
F3RM provides a general method for lifting 2D foundation model features into 3D neural representations, wiring language and vision to physical 3D space.
Equipping robots with joint reasoning over 3D geometry and semantics advances the kind of spatial and physical understanding needed for precise real-world manipulation.
Future directions include extending F3RM to dynamic scenes and multi-step manipulation tasks. The work was presented at CoRL 2023, with code and demos available at f3rm.csail.mit.edu.
Original Paper Details
Distilled Feature Fields Enable Few-Shot Language-Guided Manipulation
[arXiv:2308.07931](https://arxiv.org/abs/2308.07931)
William Shen, Ge Yang, Alan Yu, Jansen Wong, Leslie Pack Kaelbling, Phillip Isola
Self-supervised and language-supervised image models contain rich knowledge of the world that is important for generalization. Many robotic tasks, however, require a detailed understanding of 3D geometry, which is often lacking in 2D image features. This work bridges this 2D-to-3D gap for robotic manipulation by leveraging distilled feature fields to combine accurate 3D geometry with rich semantics from 2D foundation models. We present a few-shot learning method for 6-DOF grasping and placing that harnesses these strong spatial and semantic priors to achieve in-the-wild generalization to unseen objects. Using features distilled from a vision-language model, CLIP, we present a way to designate novel objects for manipulation via free-text natural language, and demonstrate its ability to generalize to unseen expressions and novel categories of objects.